




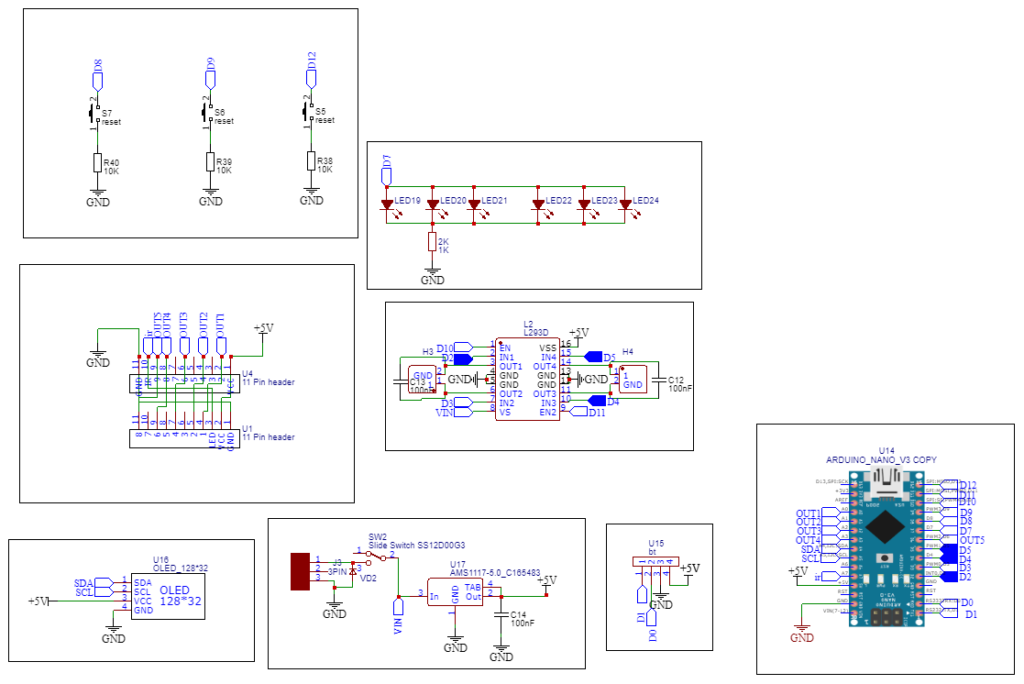
circuit diagram
arduino code
#include <SPI.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 32 // OLED display height, in pixels
int a0 = A0;
int a1 = A1;
int a2 = A2;
int a3 = A3;
int a4 = 12;
int ENA=10;
int ENB=11;
int INA1=2;
int INA2=3;
int INB1=4;
int INB2=5;
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
#define SCREEN_ADDRESS 0x3C ///< See datasheet for Address; 0x3D for 128x64, 0x3C for 128x32
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void setup()
{
Serial.begin(9600);
pinMode(a0, INPUT);
pinMode(a1, INPUT);
pinMode(a2, INPUT);
pinMode(a3, INPUT);
pinMode(a4, INPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(INA1, OUTPUT);
pinMode(INA2, OUTPUT);
pinMode(INB1, OUTPUT);
pinMode(INB2, OUTPUT);
digitalWrite(ENA,HIGH);
digitalWrite(ENB,HIGH);
// initialize the OLED object
if(!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
}
void loop()
{
display.clearDisplay();
int o4 = digitalRead(a0);
int o3 = digitalRead(a1);
int o2 = digitalRead(a2);
int o1 = digitalRead(a3);
int o0 = digitalRead(a4);
if (o0==1)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(10, 10, 10, WHITE);
display.display();
}
if (o1==1)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(35, 10, 10, WHITE);
display.display();
}
if (o2==1)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(60, 10, 10, WHITE);
display.display();
}
if (o3==1)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(85, 10, 10, WHITE);
display.display();
}
if (o4==1)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(110, 10, 10, WHITE);
display.display();
}
if (o0==0)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(10, 10, 10, BLACK);
display.display();
}
if (o1==0)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(35, 10, 10, BLACK);
display.display();
}
if (o2==0)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(60, 10, 10, BLACK);
display.display();
}
if (o3==0)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(85, 10, 10, BLACK);
display.display();
}
if (o4==0)
{
display.setTextSize(1);
display.setTextColor(WHITE);
display.fillCircle(110, 10, 10, BLACK);
display.display();
}
if (o0==1&&o2==0&&o3==1)
{
digitalWrite(INA1,HIGH);
digitalWrite(INA2,LOW);
digitalWrite(INB1,HIGH);
digitalWrite(INB2,LOW);
}
if((o0==0&&o2==0&&o3==1)||(o0==0&&o2==1&&o3==1))
{
digitalWrite(INA1,HIGH);
digitalWrite(INA2,LOW);
digitalWrite(INB1,LOW);
digitalWrite(INB2,LOW);
}
if((o0==1&&o2==0&&o3==0)||(o0==1&&o2==1&&o3==0))
{
digitalWrite(INA1,LOW);
digitalWrite(INA2,LOW);
digitalWrite(INB1,HIGH);
digitalWrite(INB2,LOW);
}
if (o0==0&&o2==0&&o3==0)
{
digitalWrite(INA1,LOW);
digitalWrite(INA2,LOW);
digitalWrite(INB1,LOW);
digitalWrite(INB2,LOW);
}
}


Leave a comment