







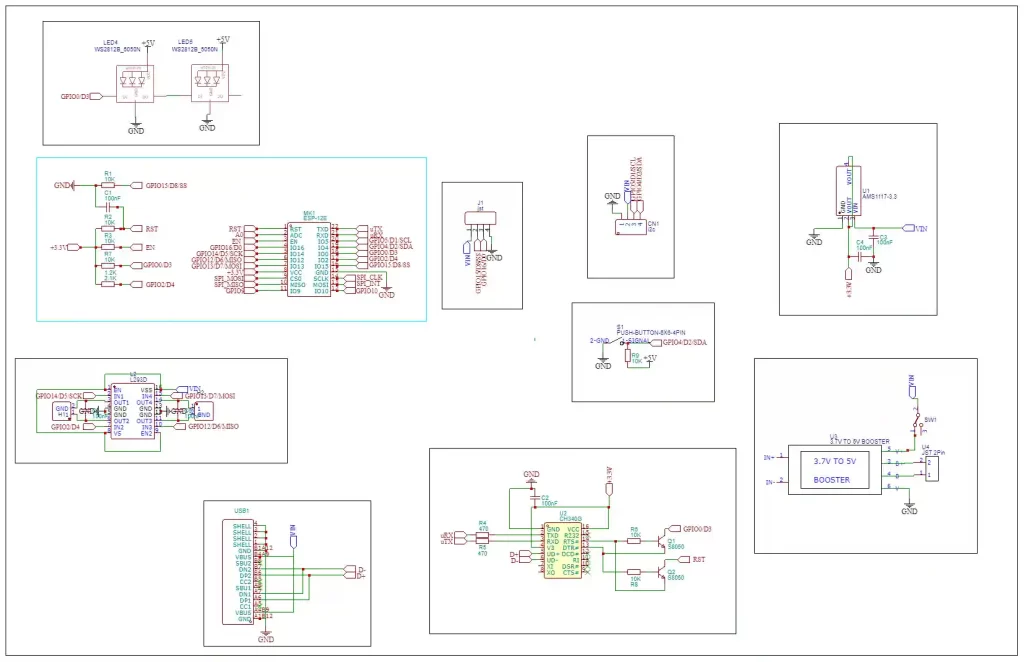
Circuit Diagram
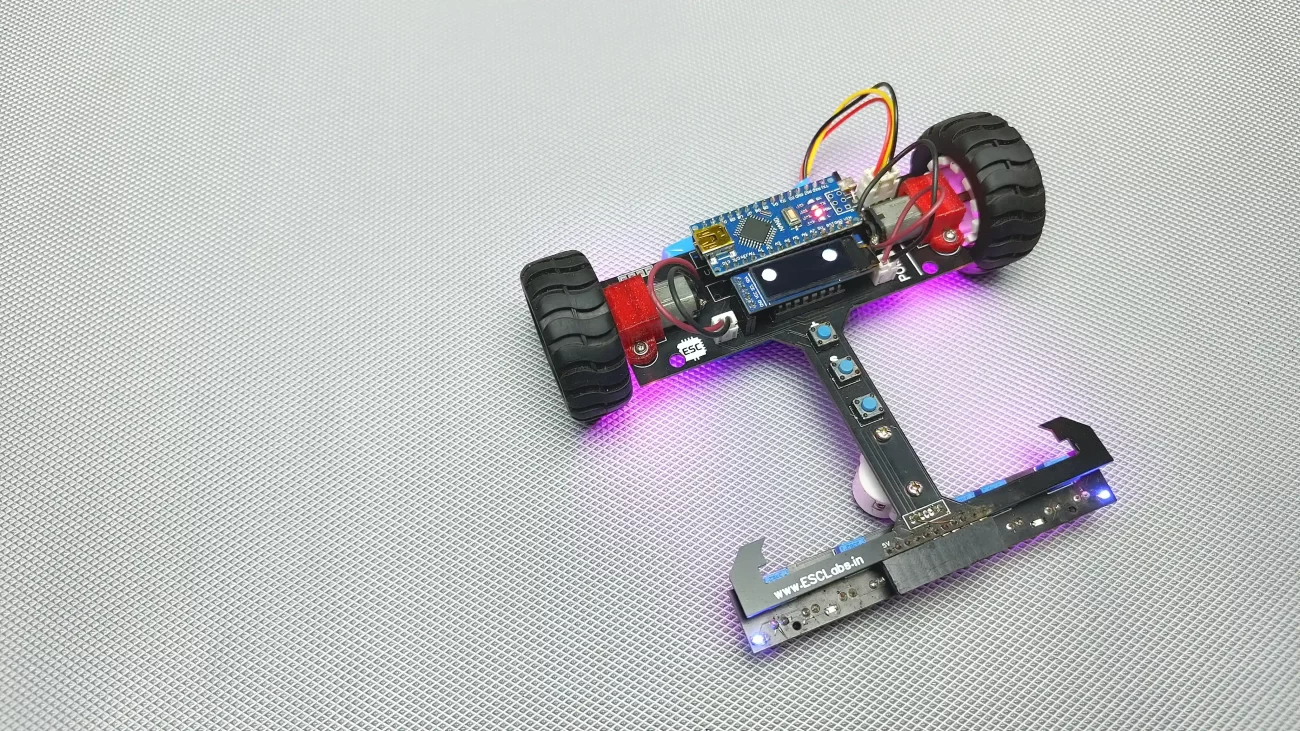
A Mars rover is a remote-controlled robot designed to travel on the surface of Mars. we have see several mars rovers like Spirit , Opportunity , Curiosity and Perseverance. these rovers are highly designed to operate on uneven terrains. I got amazed with the 6 wheel design of such rovers. so in this tutorial I am showing how to build a fully functional model MARS rover.
3D Printing
download from here
Receiver code
//RX TEST
#include <ESP8266WiFi.h>
#include <espnow.h>
#include <FastLED.h>
#define NUM_LEDS 2
#define DATA_PIN 0
CRGB leds[NUM_LEDS];
const int motor1a = 2;
const int motor1b = 14;
const int motor2a = 13;
const int motor2b = 12;
uint8_t broadcastAddress[] = {0xAC, 0x0B, 0xFB, 0xCE, 0x8B, 0x16};//MASTER ESP8266 Board MAC Address: AC:0B:FB:CF:16:91
String success;
typedef struct struct_message {
int button;
} struct_message;
int IN_button_state;
int OUT_button_state;
// Create a struct_message called DHTReadings to hold sensor readings
struct_message outgoingmsg;
// Create a struct_message to hold incoming sensor readings
struct_message incomingmsg;
// Callback when data is sent
void OnDataSent(uint8_t *mac_addr, uint8_t sendStatus) {
Serial.print("Last Packet Send Status: ");
if (sendStatus == 0){
Serial.println("Delivery success");
}
else{
Serial.println("Delivery fail");
}
}
// Callback when data is received
void OnDataRecv(uint8_t * mac, uint8_t *incomingData, uint8_t len) {
memcpy(&incomingmsg, incomingData, sizeof(outgoingmsg));
Serial.print("Bytes received: ");
Serial.println(len);
//store incoming data in variable
IN_button_state = incomingmsg.button;
if (IN_button_state==1){forward();}
if (IN_button_state==2){backward();}
if (IN_button_state==3){turnleft();}
if (IN_button_state==4){turnright();}
if (IN_button_state==5){nomotion();}
}
void getReadings(){
// Read
OUT_button_state = analogRead(A0);
delay(100);
//OUT
Serial.println("OUTGOING MESSAGES");
Serial.println(OUT_button_state);
}
void printIncomingMessage(){
// Display Readings in Serial Monitor
//IN
Serial.println("INCOMING MESSAGES");
Serial.println(IN_button_state);
}
void setup() {
FastLED.addLeds<NEOPIXEL, DATA_PIN>(leds, NUM_LEDS);
pinMode(motor1a,OUTPUT);
pinMode(motor1b,OUTPUT);
pinMode(motor2a,OUTPUT);
pinMode(motor2b,OUTPUT);
pinMode(A0,INPUT);
// Set device as a Wi-Fi Station
WiFi.mode(WIFI_STA);
WiFi.disconnect();
// Init ESP-NOW
if (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
return;
}
// Set ESP-NOW Role
esp_now_set_self_role(ESP_NOW_ROLE_COMBO);
// Once ESPNow is successfully Init, we will register for Send CB to
// get the status of Trasnmitted packet
esp_now_register_send_cb(OnDataSent);
// Register peer
esp_now_add_peer(broadcastAddress, ESP_NOW_ROLE_COMBO, 1, NULL, 0);
// Register for a callback function that will be called when data is received
esp_now_register_recv_cb(OnDataRecv);
}
void loop() {
getReadings();
//Set values to send
outgoingmsg.button = OUT_button_state;
// Send message via ESP-NOW
esp_now_send(broadcastAddress, (uint8_t *) &outgoingmsg, sizeof(outgoingmsg));
printIncomingMessage();
}
void forward()
{digitalWrite(motor1a,1);
digitalWrite(motor2a,1);
digitalWrite(motor1b,0);
digitalWrite(motor2b,0);
leds[0] = CRGB::Green;
leds[1] = CRGB::Green;
FastLED.show();
delay(50);
}
void backward()
{digitalWrite(motor1a,0);
digitalWrite(motor2a,0);
digitalWrite(motor1b,1);
digitalWrite(motor2b,1);
leds[0] = CRGB::Red;
leds[1] = CRGB::Red;
FastLED.show();
delay(50);
}
void turnleft()
{digitalWrite(motor1a,1);
digitalWrite(motor2a,0);
digitalWrite(motor1b,0);
digitalWrite(motor2b,1);
leds[0] = CRGB::Green;
FastLED.show();
delay(50);
}
void turnright()
{
digitalWrite(motor1a,0);
digitalWrite(motor2a,1);
digitalWrite(motor1b,1);
digitalWrite(motor2b,0);
leds[1] = CRGB::Green;
FastLED.show();
delay(50);}
void nomotion()
{digitalWrite(motor1a,0);
digitalWrite(motor2a,0);
digitalWrite(motor1b,0);
digitalWrite(motor2b,0);}Transmitter Program
#include <ESP8266WiFi.h>
#include <espnow.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
uint8_t broadcastAddress[] = {0xAC, 0x0B, 0xFB, 0xCF, 0x16, 0x91};//SLAVE ESP8266 Board MAC Address: AC:0B:FB:CE:8B:16
String success;
#define upButton 2
#define downButton 14
#define leftButton 13
#define rightButton 12
typedef struct struct_message
{
int button;
}
struct_message;
int IN_button_state;
int OUT_button_state;
struct_message outgoingmsg;
struct_message incomingmsg;
// Callback when data is sent
void OnDataSent(uint8_t *mac_addr, uint8_t sendStatus) {
Serial.print("Last Packet Send Status: ");
if (sendStatus == 0){
Serial.println("Delivery success");
}
else{
Serial.println("Delivery fail");
}
}
// Callback when data is received
void OnDataRecv(uint8_t * mac, uint8_t *incomingData, uint8_t len) {
memcpy(&incomingmsg, incomingData, sizeof(outgoingmsg));
Serial.print("Bytes received: ");
Serial.println(len);
//store incoming data in variable
IN_button_state = incomingmsg.button;
}
void getReadings(){
if((digitalRead(upButton)==0)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 1;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==0)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 2;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==0)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 3;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==0))
{
OUT_button_state = 4;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 5;
}
}
void setup() {
Serial.begin(115200);
pinMode(upButton,INPUT_PULLUP);
pinMode(downButton,INPUT_PULLUP);
pinMode(leftButton,INPUT_PULLUP);
pinMode(rightButton,INPUT_PULLUP);
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3D for 128x64
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
// Set device as a Wi-Fi Station
WiFi.mode(WIFI_STA);
WiFi.disconnect();
// Init ESP-NOW
if (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
return;
}
// Set ESP-NOW Role
esp_now_set_self_role(ESP_NOW_ROLE_COMBO);
// Once ESPNow is successfully Init, we will register for Send CB to
// get the status of Trasnmitted packet
esp_now_register_send_cb(OnDataSent);
// Register peer
esp_now_add_peer(broadcastAddress, ESP_NOW_ROLE_COMBO, 1, NULL, 0);
// Register for a callback function that will be called when data is received
esp_now_register_recv_cb(OnDataRecv);
}
void printIncomingMessage(){
// Display Readings in Serial Monitor
//IN
Serial.println("INCOMING MESSAGES");
Serial.println(IN_button_state);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(10, 20);
display.println("LIGHT: ");
display.setCursor(80, 20);
display.println(IN_button_state);
display.display();
delay(10);
}
void loop() {
//Get DHT readings
getReadings();
//Set values to send
outgoingmsg.button = OUT_button_state;
// Send message via ESP-NOW
esp_now_send(broadcastAddress, (uint8_t *) &outgoingmsg, sizeof(outgoingmsg));
printIncomingMessage();
}

Leave a comment